 320 447 37 16
320 447 37 16  electronicaplugandplay
electronicaplugandplay 

 Mi cuenta
Mi cuenta
EELS: El nuevo robot serpiente de la NASA que desafía los límites del espacio

Un vistazo al nuevo robot del Laboratorio de Propulsión a Chorro (JPL) de la NASA quienes han estado creando y probando un robot similar a una serpiente, el EELS (Explorador de Vida Extrabiológica). #robotica #eels #NASA #JPL #espacio #ia #lidar #inteligenciaartificial

Imagen 1. Robot EELS del JPL de la NASA.
Básicamente, el robot se está desarrollando para mapear, atravesar y explorar de manera autónoma destinos previamente inaccesibles en la Tierra, la Luna y otros mundos en nuestro sistema solar.
Estamos hablando de versatilidad que comprende arena, nieve, hielo e incluso movimiento bajo el agua, al mismo tiempo que crea un mapa tridimensional de su entorno utilizando cuatro pares de cámaras estéreo y LIDAR (utilizando pulsos láser cortos en lugar de ondas de radio).
Específicamente, ayuda con la necesidad de descender por respiraderos en la helada luna de Saturno, Encélado, y entrar en el océano subsuperficial, por lo que necesita ser súper versátil y no tener características regulares de un robot típico... si es que eso existe!
Fue prototipado por primera vez en 2019 y ahora se encuentra en la versión EELS 1.0. Tiene 10 segmentos idénticos a lo largo de su cuerpo de 5 metros, que pesa 100 kg.
"Hay docenas de libros de texto sobre cómo diseñar un vehículo de cuatro ruedas, pero no hay un libro de texto sobre cómo diseñar un robot serpiente autónomo para aventurarse audazmente donde ningún robot ha estado antes", dijo el investigador principal de EELS, Hiro Ono. "Tenemos que escribir el nuestro propio. Eso es lo que estamos haciendo ahora".
En EELS 1.0, el exterior de cada segmento puede girar, y la propulsión hacia adelante proviene de estructuras similares a tornillos de 200 mm de diámetro alrededor de cada segmento que se adhieren a superficies sueltas o se agarran a superficies más duras. Los tornillos pueden ser intercambiados según el entorno; ya se ha probado en arena, nieve y hielo.

Imagen 2. EELS en diferentes superficies/escenarios.
"Tiene la capacidad de ir a lugares a los que otros robots no pueden ir", dijo el director del proyecto, Matthew Robinson. "Aunque algunos robots son mejores en un tipo particular de terreno u otro, la idea de EELS es tener la capacidad de hacerlo en todos".
La inteligencia artificial propia y los sensores están en desarrollo, incluyendo una cabeza con cuatro pares de cámaras estéreo y LIDAR. El objetivo es que pueda crear un mapa tridimensional de su entorno, después de lo cual los algoritmos de navegación estimarán la ruta más segura.
"La meta es crear una biblioteca de formas en las que el robot puede moverse en respuesta a desafíos de terreno. Cuando te adentras en lugares donde no sabes qué encontrarás, quieres enviar un robot versátil, consciente del riesgo y preparado para la incertidumbre, capaz de tomar decisiones por sí mismo", agregó Robinson.
Algunas características de este robot son:
- EELS puede transportar y desplegar el equipo científico. En especial el Cryoegg que está dispuesto para monitorear continuamente la presión, conductividad eléctrica y temperatura de la subsuperficie.
- Control del sentido propioceptivo. Tenemos un video en nuestro canal youtube donde se explica mejor el sentido de la propiocepción: Technews.
- Conciencia posicional en 3D. La cabeza del EELS ve e interpreta el mundo en 3D con tecnología LIDAR, sensores IMUs, Giroscopios, acelerómetros y 4 pares de cámaras estéreo que envían video en tiempo real.
- Locomoción por piel activa. Mas de 20 tornillos contrarrotantes (que giran en sentidos contrarios) accionados independientemente que le dan la habilidad al EELS para maniobrar en terrenos con materiales sueltos como arena o nieve.
- Mas de 20 grados de libertad en sus movimientos. Esto le da la habilidad al EELS de adoptar muchas configuraciones de formas para adaptarse a la geometría medioambiental.
- Un sistema OPS que usa visualizaciones en tiempo real para que un operario monitoree y controle el robot mientras la interfaz de visualización muestra el status del robot, su “salud” y posibles nuevas rutas para los siguientes movimientos.
- Conciencia de riesgo automática que le ayuda de manera autónoma a atravesar superficies glaciares peligrosas descendiendo por paredes de grietas de hielo aleatorias y con alta incertidumbre.
- Longitud: 4.9M; Masa: 100Kg; Alimentación: 80Vdc y comunicación basada en Ethernet.
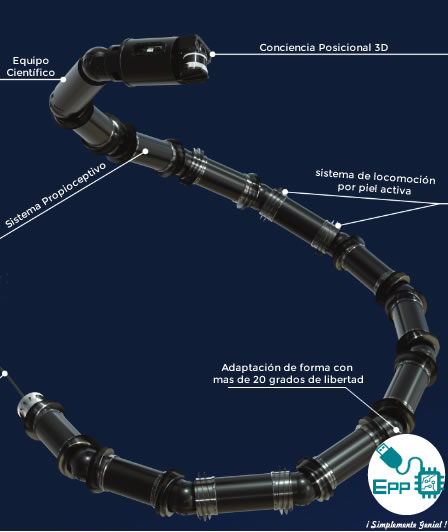
Imagen 3. Algunas Secciones del EELS.
Puedes ver a EELS en acción en video aquí: EELS
Esperamos esta información te haya sido entretenida, interesante y/o útil. No olvides dejarnos tus comentarios en nuestras redes sociales y regalarlos un  o un
o un  . También, si te ha gustado por favor compártelo!
. También, si te ha gustado por favor compártelo!


![]()
Julio/2023.